
Manipulation and the Last Inch
We are interested in the interaction of the robot with the environment,
the final inch. In order for robots to be productive they need to be able to
interact with their surroundings intelligently, to this end we seek to give
robots the ability to learn from and manipulate their environment by
designing special purpose end effectors and coming up with smart algorithms. We are inspired by the remarkable ability of humans to learn so much just through touch and translating this ability to robots.
Time
10:00 AM to 3:00 PM
Sponsor
MCube Lab (Manipulation and Mechanisms @MIT)
Location




ACTIVITY MAP
View the campus map for the 2016 Open House
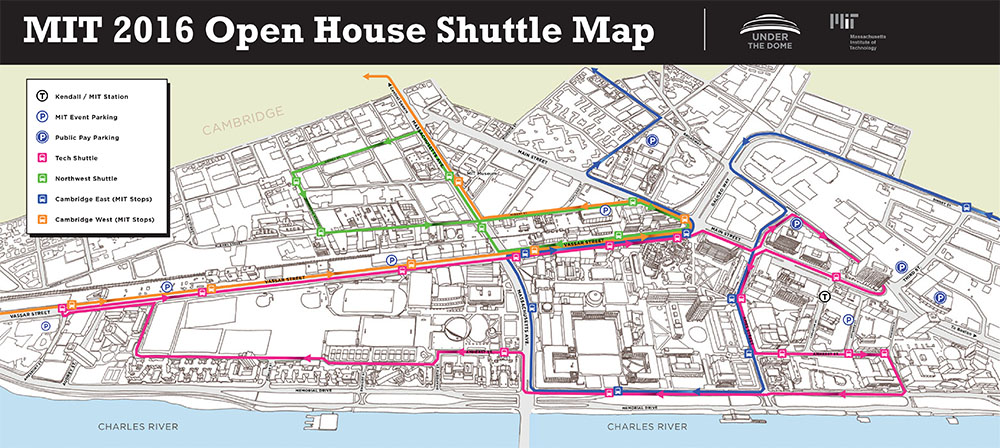
SHUTTLE MAP
View the shuttle map for the 2016 Open House
